Modulação por largura de pulso (PWM) explicada
A modulação por largura de pulso (PWM) é uma maneira simples e eficiente de controlar a energia elétrica usando sinais digitais.Em vez de alterar a tensão de alimentação, você ajusta quanto tempo o sinal permanece LIGADO e DESLIGADO em cada ciclo para controlar o fornecimento de energia.Este artigo ajuda você a entender como o PWM funciona, como o ciclo de trabalho afeta a saída e por que o PWM é amplamente utilizado em sistemas eletrônicos e de controle.Você também verá como o PWM é aplicado em controladores, tipos de formas de onda e aplicações.Catálogo
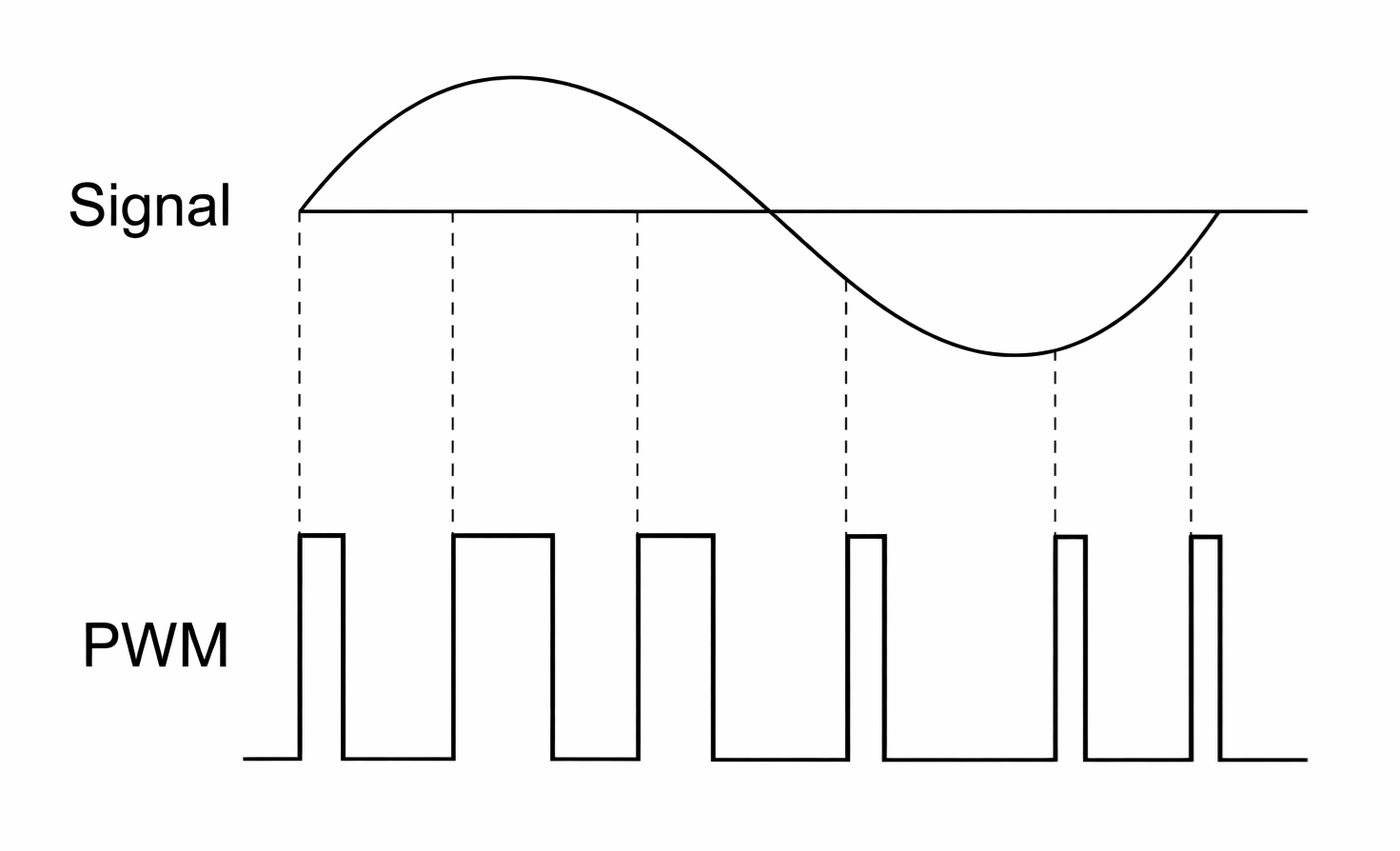
Figura 1. Conceito de modulação por largura de pulso
O que é modulação por largura de pulso?
Modulação por largura de pulso (PWM) é uma técnica de controle digital usada para regular a energia elétrica fornecida a uma carga, variando a proporção do tempo ligado dentro de um período de comutação fixo.Em vez de alterar o nível de tensão de alimentação, o PWM controla a potência efetiva alternando rapidamente o sinal entre os estados totalmente LIGADO e totalmente DESLIGADO.Esta abordagem permite uma regulação de potência eficiente com perda mínima de energia, tornando o PWM amplamente utilizado em acionamentos de motores, controle de LED, conversores de potência e sistemas de controle embarcados.
Como funciona a modulação por largura de pulso?
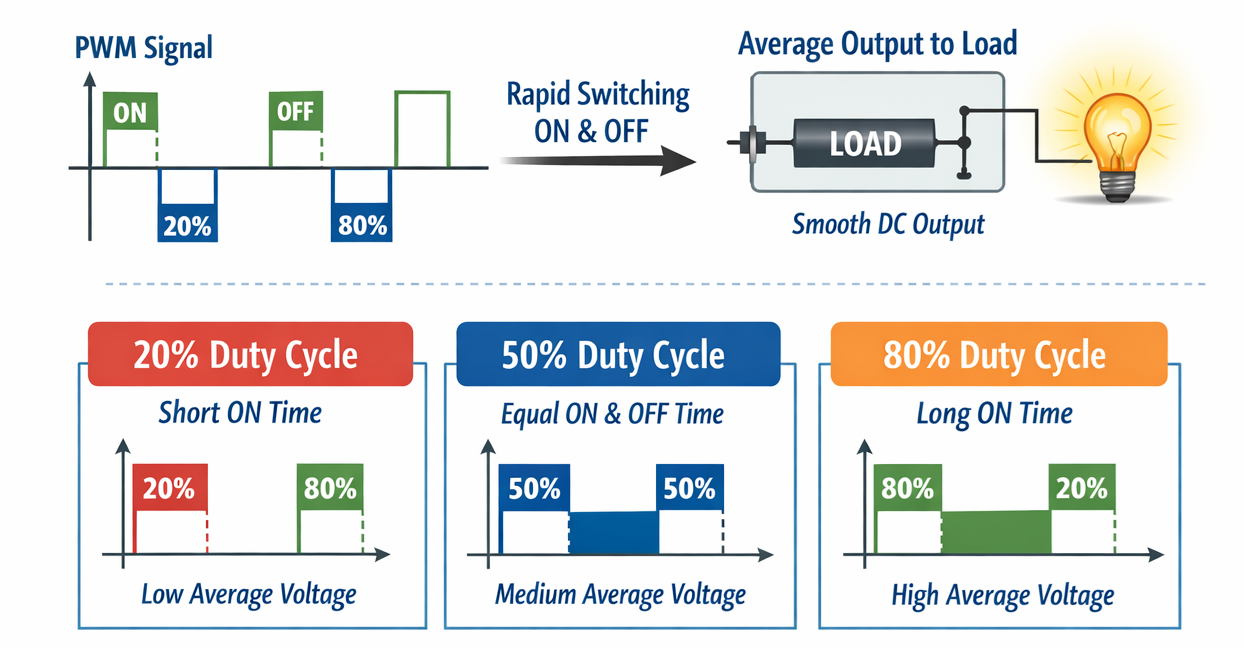
Figura 2. Princípio de funcionamento do PWM
A modulação por largura de pulso funciona ligando e desligando repetidamente o sinal de saída em uma frequência constante.Durante cada ciclo de comutação, o sinal permanece LIGADO por um período específico e DESLIGADO pelo restante do ciclo.A relação entre o tempo ligado e o tempo total do ciclo é conhecida como ciclo de trabalho e determina diretamente a tensão e a corrente médias fornecidas à carga.Um ciclo de trabalho mais alto aumenta a potência entregue, enquanto um ciclo de trabalho mais baixo a reduz.
Como a frequência de comutação é normalmente muito mais alta do que a resposta elétrica ou mecânica da carga, a carga responde ao valor médio do sinal em vez de a pulsos individuais.Como resultado, o PWM permite um controle de potência suave e preciso usando sinais digitais sem a necessidade de fontes de tensão variáveis.
Características da forma de onda do sinal PWM
|
PWM
Característica |
Descrição |
|
Largura de pulso |
Hora LIGADA
dentro de um ciclo PWM, de 0 microssegundos até o período completo. |
|
Ciclo de trabalho |
Porcentagem de
Tempo ON por ciclo, de 0% a 100%. |
|
Frequência PWM |
Número de
ciclos por segundo, geralmente de 500 Hz a 100 kHz. |
|
Período PWM |
Ciclo total
tempo, normalmente de 1 milissegundo a 10 microssegundos. |
|
Sinal
Amplitude |
Nível de tensão
do sinal PWM, geralmente 3,3 V, 5 V ou 12 V. |
|
Alta Tensão
Nível |
Tensão
durante o estado LIGADO, igual à tensão de alimentação. |
|
Baixa Tensão
Nível |
Tensão
durante o estado DESLIGADO, normalmente 0 V. |
|
Tempo de subida |
Hora de
mude de baixo para alto, geralmente de 10 ns a 1 µs. |
|
Tempo de outono |
Hora de
mude de alto para baixo, geralmente de 10 ns a 1 µs. |
|
Troca
Velocidade |
Taxa máxima
de mudança de estado, apoiando PWM de alta frequência. |
|
Resolução |
Número de
etapas de serviço, geralmente de 8 ou 10 bits. |
|
Sinal
Estabilidade |
Consistência
de frequência e ciclo de trabalho ao longo do tempo. |
|
Tremor |
Tempo pequeno
variação, geralmente inferior a 1%. |
|
Tempo Morto |
Intencional
atraso entre a comutação, normalmente de 100 ns a 5 µs. |
|
Harmônicos |
Alta frequência
componentes gerados pela comutação rápida. |
|
Controle de energia |
Potência de saída
varia linearmente com o ciclo de trabalho. |
|
Resposta de carga |
Capacidade de
manter a forma de onda sob mudanças de carga. |
|
Filtragem
Saída |
PWM filtrado
produz tensão DC suave. |
|
Ruído
Imunidade |
Resistência a
a interferência melhora com bordas limpas. |
Tipos de modulação por largura de pulso
A modulação por largura de pulso pode ser classificada em diferentes estratégias de controle com base em como a forma de onda de saída é moldada.Esses tipos de PWM concentram-se em conceitos de modulação e algoritmos de controle que afetam a tensão de saída, o desempenho harmônico e a eficiência.
Modulação por largura de pulso único (PWM de pulso único)
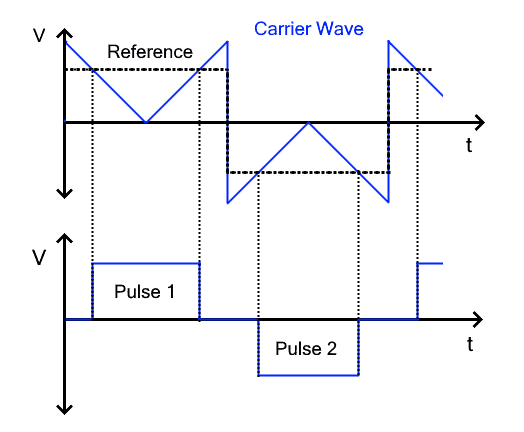
Figura 3. Forma de onda PWM de pulso único
O PWM de pulso único usa um pulso de comutação por meio ciclo da forma de onda de saída.A largura deste pulso único é ajustada para controlar o nível de tensão de saída.Como ocorre apenas um evento de comutação por meio ciclo, as perdas de comutação permanecem baixas.No entanto, esta estratégia de controle produz maior distorção harmônica e é usada principalmente em aplicações básicas de controle de potência e de baixa frequência, onde a simplicidade é priorizada em detrimento da qualidade da forma de onda.
Modulação por largura de pulso múltiplo (PWM de pulso múltiplo)
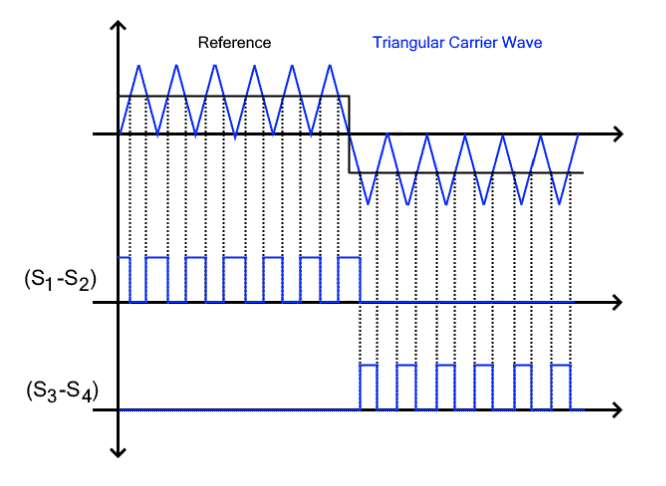
Figura 4. Forma de onda PWM de pulso múltiplo
O PWM de pulso múltiplo divide cada meio ciclo em vários pulsos menores, em vez de um único pulso grande.Aumentar o número de pulsos espalha a energia harmônica em direção a frequências mais altas, melhorando a qualidade da forma de onda de saída.Este tipo PWM oferece um equilíbrio entre distorção harmônica reduzida e perdas de comutação gerenciáveis, tornando-o adequado para conversores de energia industriais e sistemas de acionamento motorizado.
Modulação por largura de pulso sinusoidal (SPWM)
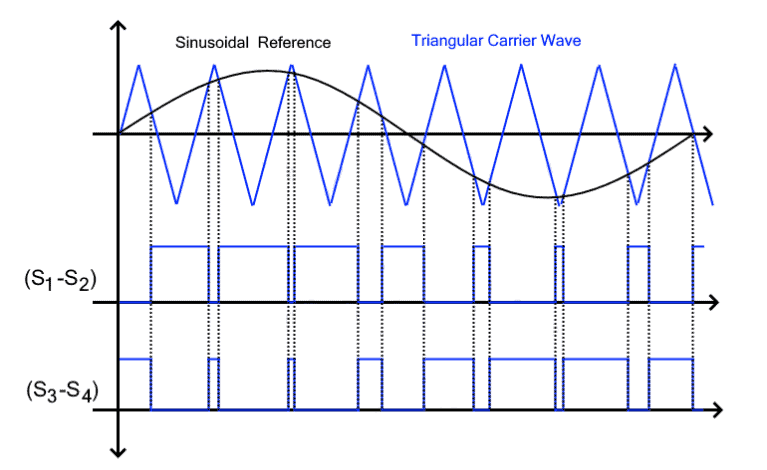
Figura 5. Geração PWM sinusoidal
PWM sinusoidal é uma estratégia de modulação que gera pulsos baseados em um sinal de referência senoidal.As larguras de pulso variam de acordo com a amplitude instantânea da forma de onda de referência, permitindo que a saída se aproxime de uma onda senoidal após a filtragem.O SPWM é amplamente utilizado em inversores, acionamentos de motores e sistemas de energia renovável porque fornece bom desempenho harmônico com complexidade de controle moderada.
Modulação por largura de pulso vetorial espacial (SVPWM)
Space Vector PWM é uma estratégia de controle avançada que usa um modelo vetorial matemático do inversor em vez de comparação direta de formas de onda.Ele seleciona estados de comutação ideais para aproximar um vetor de referência rotativo no espaço de tensão.Comparado ao SPWM, o SVPWM melhora a utilização da tensão do barramento CC e reduz ainda mais a distorção harmônica, tornando-o adequado para acionamentos de motores de alto desempenho e sistemas de controle industrial de precisão.
Métodos de geração PWM
Os sinais PWM também podem ser categorizados pela forma como os pulsos são gerados e alinhados no hardware.Esses métodos de geração de PWM concentram-se na operação do temporizador, na simetria de comutação e no posicionamento do pulso, e não na estratégia de modulação em si.
PWM de borda única (PWM alinhado à borda)
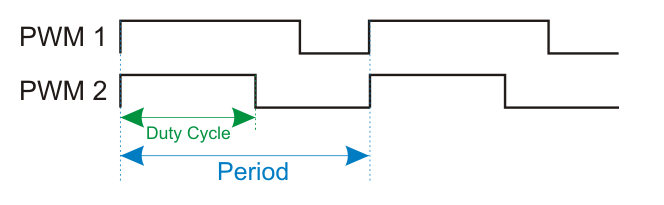
Figura 6. Tempo PWM alinhado à borda
O PWM de borda única alinha todos os pulsos a uma borda do período de comutação, normalmente a borda ascendente.O ciclo de trabalho é ajustado estendendo ou encurtando o pulso a partir desta borda fixa.Este método de geração é simples de implementar usando temporizadores e comparadores de hardware, mas seu padrão de comutação assimétrico pode aumentar a distorção harmônica e a interferência eletromagnética.
PWM de borda dupla (PWM alinhado ao centro)
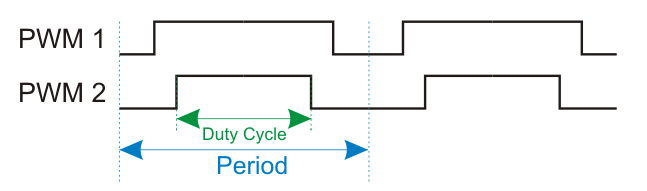
Figura 7. Tempo PWM alinhado ao centro
O Double-Edge PWM centraliza o pulso dentro do período de comutação ligando e desligando simetricamente em torno do ponto médio.Este tempo simétrico reduz a distorção harmônica e a interferência eletromagnética, ao mesmo tempo que melhora o equilíbrio da corrente.Devido a essas vantagens, o PWM alinhado ao centro é comumente usado em acionamentos de motores de precisão e aplicações de controle de potência de alto desempenho.
PWM baseado em operadora (PWM comparador)
O PWM baseado em portadora gera pulsos comparando um sinal de referência com uma forma de onda portadora de alta frequência usando um comparador.Quando a referência excede a portadora, a saída é ligada.Este método serve como base de geração de hardware para muitas estratégias de controle PWM, incluindo SPWM, e é amplamente implementado em microcontroladores, DSPs e controladores industriais.
PWM em microcontroladores e controladores
Modulação por largura de pulso no Arduino
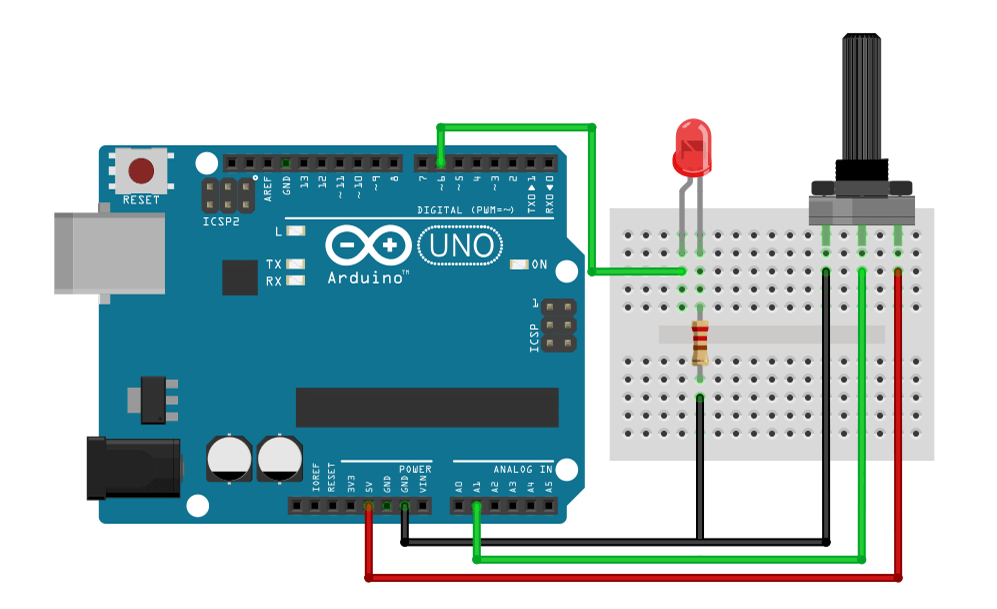
Figura 8. Controle de LED Arduino PWM
O Arduino gera modulação por largura de pulso usando temporizadores de hardware internos que alternam o pino de saída entre os estados HIGH e LOW.O ciclo de trabalho é ajustado através de um software, que controla diretamente a tensão média entregue à carga.Ao alterar o ciclo de trabalho, o Arduino pode variar suavemente o brilho do LED ou a velocidade do motor sem alterar a tensão de alimentação.A frequência PWM geralmente é fixada pelas configurações do temporizador, garantindo uma operação estável durante as tarefas de controle.Conforme mostrado na figura, o pino PWM do Arduino aciona um LED através de um resistor, demonstrando claramente como a variação do ciclo de trabalho altera o brilho visível.
Modulação por largura de pulso no ESP32
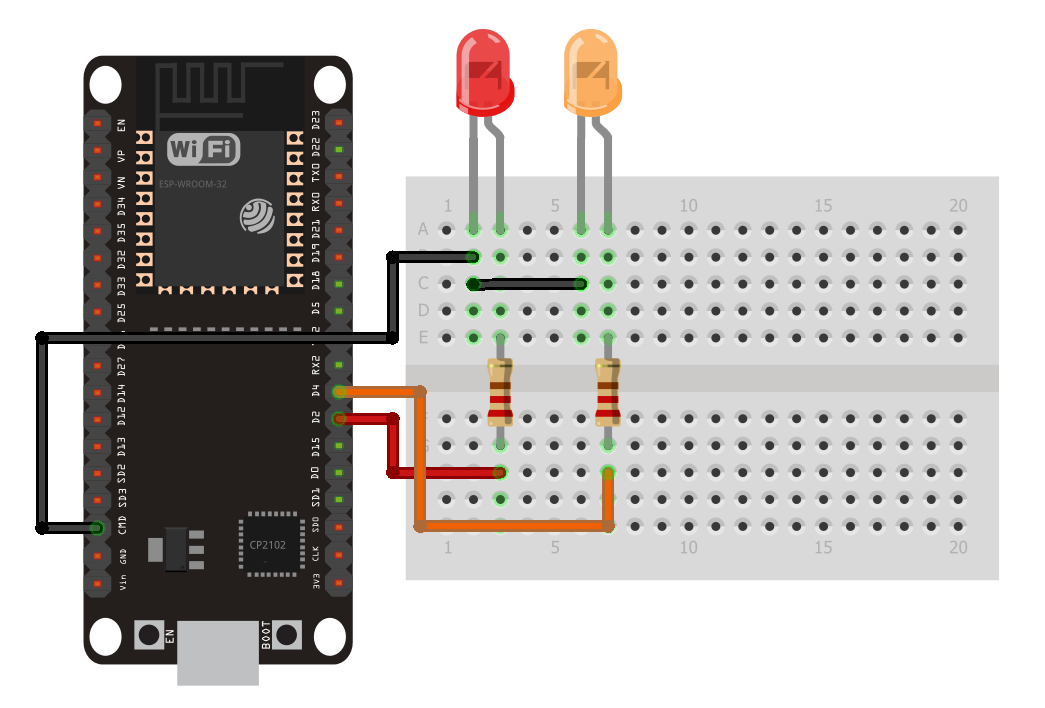
Figura 9. Exemplo de saída ESP32 PWM
ESP32 fornece modulação por largura de pulso avançada usando módulos de hardware PWM dedicados.Ele suporta resolução mais alta, vários canais PWM independentes e controle de frequência flexível sem colocar carga na CPU.Isso permite controle de energia preciso e responsivo para motores, LEDs e dispositivos IoT.ESP32 PWM é especialmente adequado para aplicações que exigem resposta rápida e regulação de saída precisa.A Figura 9 mostra o ESP32 controlando vários LEDs com diferentes ciclos de trabalho PWM, ilustrando como cada canal ajusta independentemente a potência de saída.
Modulação por largura de pulso em PLCs
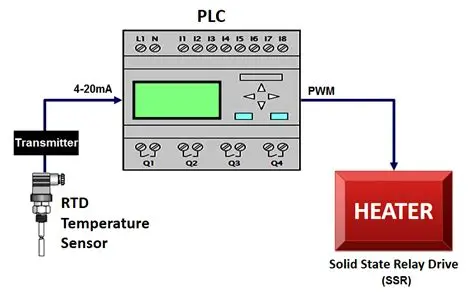
Figura 10. Controle do aquecedor PLC PWM
Os CLPs usam modulação por largura de pulso para controlar cargas industriais, como aquecedores, motores e atuadores, com alta confiabilidade.A saída PWM é ajustada com base no feedback do sensor ou na lógica de controle programada para regular a potência com precisão.Este método permite um controle suave enquanto minimiza o estresse elétrico nos dispositivos de comutação.O PWM baseado em PLC foi projetado para operar de forma confiável em ambientes industriais eletricamente ruidosos e agressivos.Conforme mostrado na figura, o PLC usa um sinal PWM para acionar um relé de estado sólido que controla a potência do aquecedor com base no feedback de temperatura.
Aplicações de modulação por largura de pulso
A modulação por largura de pulso é amplamente utilizada para controlar a energia com eficiência e precisão em aplicações eletrônicas de baixa e alta potência.
1. Controle de velocidade do motor
O PWM é comumente usado em motores DC, servo motores e acionamentos de motores BLDC para controlar a velocidade e o torque variando a tensão média fornecida ao motor.Este método fornece controle de velocidade suave e alta eficiência em robótica, automação industrial e veículos elétricos.
2. Dimerização de LED e controle de iluminação
Nos drivers de LED, o PWM controla o brilho ligando e desligando rapidamente o LED, mantendo um nível de corrente constante.Isso evita a mudança de cores, melhora a eficiência e permite o ajuste preciso do brilho em monitores, iluminação automotiva e sistemas de iluminação inteligentes.
3. Fontes de alimentação e regulação de tensão
PWM é uma técnica central em fontes de alimentação comutadas, conversores DC-DC e inversores.Ajuda a regular a tensão e a corrente de saída de forma eficiente, reduzindo a geração de calor em comparação com reguladores lineares.
4. Geração de sinal de áudio
PWM é usado em amplificadores de áudio Classe D para converter sinais de áudio em sinais de comutação de alta frequência.Isso permite amplificação de áudio de alta potência com baixa perda de potência e design de circuito compacto.
5. Aquecimento e controle de temperatura
O PWM controla a energia fornecida aos aquecedores, elementos de aquecimento e sistemas de controle de temperatura ajustando o tempo liga-desliga da fonte.Isto proporciona uma regulação estável da temperatura em aquecedores industriais, estações de solda e eletrodomésticos.
6. Carregamento de bateria e gerenciamento de energia
O PWM é aplicado em carregadores de bateria e controladores de carga solar para gerenciar a corrente e a tensão de carga.Isso melhora a eficiência do carregamento, protege as baterias contra sobrecarga e prolonga a vida útil da bateria.
7. Microcontrolador e Sistemas Embarcados
As saídas PWM de microcontroladores são amplamente utilizadas para gerar sinais semelhantes aos analógicos, controlar atuadores e fazer interface com dispositivos externos.Isso torna o PWM importante em sistemas embarcados, dispositivos IoT e aplicações de controle.
PWM vs Controle Linear vs Controle de Ângulo de Fase
|
Parâmetro |
PWM
Controle |
linear
Controle |
Fase
Controle de ângulo |
|
Controle Básico
Método
|
A saída é
controlado pela variação do ciclo de trabalho |
A saída é
controlado pela queda de tensão linearmente |
A saída é
controlado atrasando a condução da forma de onda AC |
|
Fornecimento típico
Tipo |
Alimentação CC
fornecimento |
Alimentação CC
fornecimento |
Alimentação CA
fornecimento |
|
Sinal de controle
Frequência |
Geralmente 1
kHz a 100 kHz |
Zero
frequência de comutação |
Linha
frequência de 50 Hz ou 60 Hz |
|
Eficiência energética |
Eficiência
normalmente 85 por cento a 98 por cento |
Eficiência
normalmente 30 por cento a 60 por cento |
Eficiência
normalmente 70 por cento a 90 por cento |
|
Geração de Calor |
A perda de calor é
baixo devido à operação de comutação |
A perda de calor é
alto devido à queda de tensão |
A perda de calor é
moderado durante condução parcial |
|
Tensão de saída
Regulamento |
Média
a tensão é controlada pelo ciclo de trabalho |
Saída
a tensão segue a entrada de controle diretamente |
Tensão eficaz
varia com o ângulo de disparo |
|
Resolução de controle |
Alto
resolução com temporizadores digitais |
Muito alto
resolução com controle analógico |
Médio
resolução limitada pela forma de onda AC |
|
Complexidade do Circuito |
Médio
complexidade com componentes de comutação |
Simples
circuito com elemento de passagem |
Médio
complexidade usando TRIAC ou SCR |
|
EMI e ruído
Nível |
EMI é
moderado a alto sem filtragem |
EMI é muito
baixo |
EMI é alto
devido à distorção da forma de onda |
|
Troca Típica
Dispositivo |
MOSFET ou
IGBT |
BJT ou linear
regulador |
TRIAC ou SCR |
|
Velocidade de resposta |
Tempo de resposta
está em microssegundos |
Tempo de resposta
está em milissegundos |
Tempo de resposta
depende do cruzamento zero AC |
|
Compatibilidade de carga |
Melhor para
LEDs de motores e conversores de energia |
Melhor para baixo
cargas analógicas de energia |
Melhor para
aquecedores de lâmpadas e motores AC |
|
Faixa de classificação de potência |
De 1 watt
para vários quilowatts |
Geralmente abaixo
50 watts |
Geralmente de
100 watts a vários quilowatts |
|
Precisão de controle |
Precisão
depende da resolução do temporizador |
Muito preciso
e controle suave |
Precisão
afetado pela variação da tensão da linha |
|
Aplicativos comuns |
Velocidade do motor
controlar o escurecimento do LED SMPS |
Áudio
circuitos de sensores de amplificadores |
Dimmers de luz
reguladores de ventilador controle de aquecedor |
Conclusão
A modulação por largura de pulso fornece controle de potência eficiente e preciso, variando o ciclo de trabalho de um sinal de comutação.Diferentes tipos de PWM e métodos de geração afetam a qualidade da forma de onda, a eficiência e o desempenho do sistema.O PWM é amplamente utilizado em microcontroladores, PLCs e eletrônica de potência para motores, iluminação, conversão de energia e controle de temperatura.Sua simplicidade e eficiência o tornam essencial nas aplicações eletrônicas modernas.
Sobre Nós
ALLELCO LIMITED
Consulte Mais informação
Inquérito rápido.
Por favor, envie uma consulta, responderemos imediatamente.
perguntas frequentes [FAQ]
1. O PWM pode danificar motores ou LEDs se usado incorretamente?
Sim, configurações inadequadas de PWM, como frequência muito alta, filtragem inadequada ou seleção incorreta de driver, podem causar superaquecimento, ruído ou redução da vida útil.Usar a frequência PWM correta e circuitos de driver adequados evita danos.
2. Qual frequência PWM é melhor para motores, LEDs e aquecedores?
Os motores normalmente usam frequências PWM entre 1 kHz e 20 kHz, os LEDs geralmente usam de 500 Hz a 5 kHz e os aquecedores podem usar frequências muito baixas, como 1 Hz a 100 Hz.A frequência ideal depende do tipo de carga e da aplicação.
3. Preciso de um filtro ao usar PWM para sinais analógicos?
Sim, um filtro passa-baixa é recomendado quando o PWM é usado para gerar tensões semelhantes às analógicas.A filtragem suaviza a forma de onda PWM e reduz a ondulação, tornando-a adequada para circuitos sensíveis.
4. Quais componentes são necessários para construir um circuito de controle PWM?
Um sistema PWM básico requer um controlador, dispositivo de comutação, circuito de driver, fonte de alimentação e carga.Componentes adicionais como filtros, circuitos de proteção e dissipadores de calor podem ser necessários dependendo do nível de potência.
5. O PWM cria ruído elétrico ou interferência?
A comutação PWM pode gerar interferência eletromagnética se não for projetada corretamente.O uso de blindagem, filtragem, aterramento adequado e frequência de comutação correta ajuda a reduzir problemas de ruído.

Visão geral técnica do amplificador operacional duplo AD8542AR
em 13/01/2026
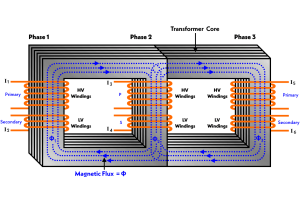
Vantagens e desvantagens das conexões de transformadores trifásicos
em 12/01/2026
Postagens populares
-

Computadores de conjunto de instruções complexos: como eles mudaram de computação?
em 18/04/8000 147776
-

Pinagem e recursos USB-C
em 18/04/2000 112018
-

Usando o Xilinx Unified Simulation Primitives: um guia abrangente para design e simulação do FPGA
em 18/04/1600 111351
-

Tensões de fonte de alimentação em eletrônica: significado de VCC, VDD, VEE, VSS e GND
em 18/04/0400 83775
-

Guia do conector RJ45: pinagem, fiação, tipos de cabos e usos
em 01/01/1970 79571
-

O guia final para os códigos de cores de arame em sistemas elétricos modernos
A maneira como nossos sistemas elétricos usam cores não é apenas para a aparência.Cada cor do fio agora indica uma função específica, facilitando a identificação e manuseio componentes elétricos co...em 01/01/1970 66962
-

Guia da válvula de purga: função, sintomas, teste e substituição para o desempenho ideal do motor
A válvula de purga é uma parte essencial do sistema de um carro que ajuda a manter o ar limpo, gerenciando vapores de combustível antes que eles possam escapar da atmosfera.Isso não apenas ajuda o ...em 01/01/1970 63103
-

Fator de qualidade (Q): equações e aplicações
O fator de qualidade, ou 'q', é importante ao verificar como os indutores e ressonadores trabalham em sistemas eletrônicos que usam frequências de rádio (RF).'Q' mede o quão bem um circuito minimiz...em 01/01/1970 63041
-

Alcançando o desempenho máximo com o teorema máximo de transferência de energia
O teorema da transferência de energia máxima explica como a energia de uma fonte, como uma bateria ou gerador, flui para uma carga conectada.Ele mostra a condição exata em que a carga recebe mais e...em 01/01/1970 54097
-

A23 Especificações da bateria e compatibilidade
A bateria A23 é uma pequena bateria em forma de cilindro com alta tensão.Também chamado 23A, 23AE, ou MN21, funciona a 12 volts e muito mais alto que as baterias AA ou AAA.Seu design espec...em 01/01/1970 52186
Número da peça quente
-

NSS12201LT1G
onsemi
TRANS NPN 12V 2A SOT23-3
MCP100T-300I/TT
Microchip Technology
IC SUPERVISOR 1 CHANNEL SOT23-3
245602020000829
KYOCERA AVX
CONN RCPT 20POS SMD GOLD
ADM708ARMZ-REEL
Analog Devices Inc.
IC SUPERVISOR 1 CHANNEL 8MSOP
GRM033R61E472MA12D
Murata Electronics
CAP CER 4700PF 25V X5R 0201
Z8FS040BSB20EG
Zilog
IC MCU 4KB FLASH 8SOIC
NCP380HMU15AATBG
onsemi
IC PWR SWITCH P-CHAN 1:1 6UDFN
TPS2216DAPR
Texas Instruments
IC PWR SWITCH 1:1 32HTSSOP
FIN210ACGFX
onsemi
IC SER/DES 10BIT 42-USSBGA
P6SMB160AT3G
Littelfuse Inc.
TVS DIODE 136VWM 219VC SMB
Z8F082AHJ020SG
Zilog
IC MCU 8BIT 8KB FLASH 28SSOP
1N4148TA
onsemi
DIODE GEN PURP 100V 200MA DO35
AT24HC04BN-SP25-T
Microchip Technology
IC EEPROM 4KBIT I2C 400KHZ 8SOIC
MM5Z6V2
onsemi
DIODE ZENER 6.2V 200MW SOD523F
AD7545JNZ
Analog Devices Inc.
IC DAC 12BIT A-OUT 20DIP
VDZT2R6.2B
Rohm Semiconductor
DIODE ZENER 6.2V 100MW VMD2
JS28F128P30B85A
Micron Technology Inc.
IC FLASH 128MBIT PAR 56TSOP
NCV8501PDW33
onsemi
IC REG LINEAR 3.3V 150MA 16SOIC -

ZXT10N50DE6TA
Diodes Incorporated
TRANS NPN 50V 3A SOT23-6
LTC2310CMSE-14#PBF
Analog Devices Inc.
IC ADC 14BIT SAR 16MSOP
LS7267-S
LSI/CSI
IC BCD COUNTER DL 24BIT 28SOIC
VDI25-06P1
IXYS
IGBT MOD 600V 24.5A 82W ECO-PAC2
BTA204S-800C,118
NXP USA Inc.
TRIAC 800V 4A DPAK
AK8973
Asahi Kasei Microdevices/AKM
SENSOR HALL EFFECT I2C 16QFN
BZX584B12V
Yangjie Technology
SOD-523 12V 0.2W Diodes Zener
MBR400200CT
GeneSiC Semiconductor
DIODE SCHOTTKY 200V 200A 2 TOWER
ISO7760DWR
Texas Instruments
DGTL ISO 5000VRMS 6CH GP 16SOIC
ISL6207HRZ-T
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 8QFN
9DB436AGILF
Renesas Electronics America Inc
IC
MAX795SCSA+
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL 8SOIC
LFXP2-5E-5TN144C
Lattice Semiconductor Corporation
IC FPGA 100 I/O 144TQFP
LM358NG
onsemi
IC OPAMP GP 2 CIRCUIT 8DIP
AT27C040-90PU
Microchip Technology
IC EPROM 4MBIT PARALLEL 32DIP
HCPL-4503
Broadcom Limited
OPTOISOLATOR 3.75KV TRANS 8-DIP
MAX887HESA+T
Analog Devices Inc./Maxim Integrated
IC REG BUCK ADJ 600MA 8SOIC
W3A45A470KAT2A
KYOCERA AVX
CAP ARRAY 47PF 50V NP0 0612 -

RUEF600
Littelfuse Inc.
PTC RESET FUSE 30V 6A RADIAL
IRS21844PBF
Infineon Technologies
IC GATE DRVR HALF-BRIDGE 14DIP
HMC720LP3E
Analog Devices Inc.
IC CLK BUFFER 1:2 14GHZ 16QFN
RT0805DRE07143RL
YAGEO
RES SMD 143 OHM 0.5% 1/8W 0805
LTC2803CDHC#TRPBF
Analog Devices Inc.
IC TRANSCEIVER HALF 2/2 16DFN
NCS4-442+
Mini-Circuits
1:2 LTCC TRANSFORMER, 3300 - 420
CC1206KKX7RCBB221
YAGEO
CAP CER 220PF 1KV X7R 1206
VI-J32-MZ
Vicor Corporation
DC DC CONVERTER 15V 25W
TMS320F28075PTPT
Texas Instruments
IC MCU 32BIT 512KB FLSH 176HLQFP
NJL6402R-2-TE1
Nisshinbo Micro Devices Inc.
COBP PHOTO DIODE FOR FRONT MONIT
LM1269DNA
Texas Instruments
AUDIO/VIDEO AMPLIFIER
MAX3222EIDBR
Texas Instruments
IC TRANSCEIVER FULL 2/2 20SSOP
74LVTH162245MTD
onsemi
IC TXRX NON-INVERT 3.6V 48TSSOP
INA2137UA
Texas Instruments
IC AMP CLASS AB STEREO 14SOIC
EL3063
Everlight Electronics Co Ltd
OPTOISOLATOR 5KV TRIAC 6DIP
HIP6603BCBZ-T
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 8SOIC
MBR360RLG
onsemi
DIODE SCHOTTKY 60V 3A AXIAL
EFM32ZG110F32-QFN24
Silicon Labs
IC MCU 32BIT 32KB FLASH 24QFN