Controlador do motor de passo de TB6600: pinagem, interface Arduino e como funciona
Catálogo
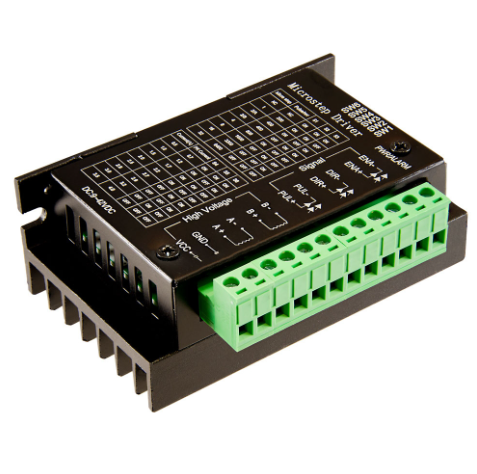
Visão geral do módulo de driver do motor de passo TB6600
O TB6600 O módulo de driver do motor de passo é um dispositivo distinguido por sua resiliência e adaptabilidade para controlar os motores de passo em duas fases.Ele se conecta perfeitamente a uma ampla variedade de microcontroladores, principalmente Arduino, promovendo a criação de saídas precisas de pulso digital de 5V.Essas saídas são dinâmicas para manter o delicado equilíbrio do controle do motor.Operando dentro de uma faixa de tensão de 9-42V DC e suportando uma corrente de pico de 4 amperes, é uma escolha versátil para vários projetos acionados por motor.Essa adaptabilidade permite gerenciar com eficiência o posicionamento e a velocidade do motor, o que é altamente benéfico em aplicativos que visam minimizar a complexidade da codificação.O isolamento optocouplelador de alta frequência do módulo aumenta significativamente sua confiabilidade, reduzindo os riscos de interferência e garantindo operação constante.
A harmonia com numerosos microcontroladores faz do driver TB6600 uma opção adequada para projetos que exigem controle motor intrincado.Ele se integra sem problemas a plataformas como o Arduino, refletindo sua capacidade de atender às diversas expectativas.Por exemplo, o uso desse driver em máquinas CNC ou impressoras 3D permite um movimento preciso e controlado, o que ilustra sua utilidade em vários campos.
Este módulo se destaca graças ao seu suporte para motores de passo bidirecional e quatro fases, bem como configurações híbridas.O design bipolar H-Bridge é parte integrante do gerenciamento de tensão e corrente com eficiência, garantindo que o motorista ofereça desempenho de pico em seus aplicativos.Em ambientes onde a precisão e a confiabilidade são priorizadas, como linhas de produção e robótica automatizadas, esses recursos são altamente valorizados.
Características
|
Recurso |
Descrição |
|
Tipo de driver |
Driver Bipolar H-Bridge DC |
|
Opções de corrente de saída |
8 tipos (0,5a a 3,5a), selecionáveis até 4 amperes |
|
Modos de subdivisão |
Divide até 32, selecionável em 6 modos |
|
Opções de etapa micro |
8 tipos (1, 2/a, 2/b, 4, 8, 16, 32) |
|
Isolamento do sinal de entrada |
Separação fotoelétrica de alta velocidade |
|
Interface |
Interface de pulso único padrão completo |
|
Função de espera offline |
Sim |
|
Adequação ambiental |
Corpo semi-fechado para ambientes severos |
|
Função de bloqueio de energia |
Semi-automático, economizando energia |
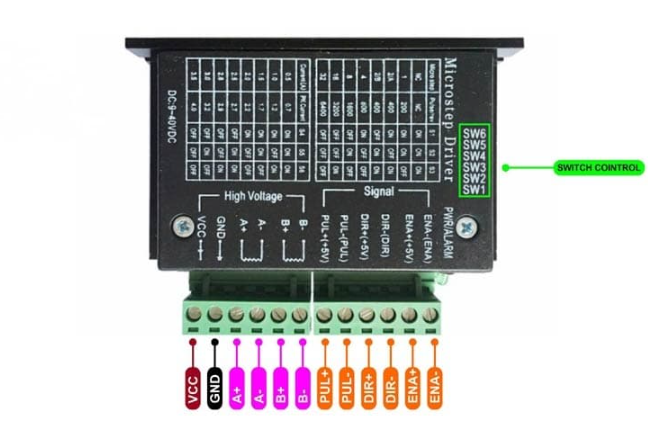
Configuração do pino
Especificações técnicas
|
Especificação |
Detalhes |
|
Tensão operacional |
9-40V DC |
|
Corrente de saída |
0.7a-4.0a (selecionável em 8 etapas por meio de interruptores de mergulho) |
|
Frequência de pulso de entrada |
Até 20kHz |
|
Níveis de sinal de entrada |
Níveis de sinal de 5V |
|
Pulso por revolução |
200-6400 |
|
Corrente do sinal lógico |
8a-15a |
|
Compatibilidade motora |
Adequado para motores de passo em duas e quatro fases |
|
Recursos de proteção |
Proteção de sobrecorrente e superaquecimento |
|
Isolamento de entrada |
Opticamente isolado |
|
Resistência ao isolamento |
500 megohms |
|
Modo suportado |
Modo PUL/FIR |
|
Custo |
Baixo custo |
Configuração do circuito H-Bridge para o TB6600
O módulo de driver do motor de passo TB6600 é um componente sério projetado para controlar os motores de passo em duas e quatro fases, utilizando uma configuração bi-polar de ponte H para operação eficiente.Essa configuração emprega transistores MOSFET para garantir o alto desempenho em termos de manuseio atual e estabilidade térmica.O módulo opera interagindo com dois pinos de controle primário: o pino de etapa, que desencadeia um pisada de motor a cada pulso e o pino de direção, que determina a direção rotacional do motor com base na tensão aplicada.Juntos, esses insumos permitem controle preciso sobre a sequência de trampolins e a direção da rotação do motor.
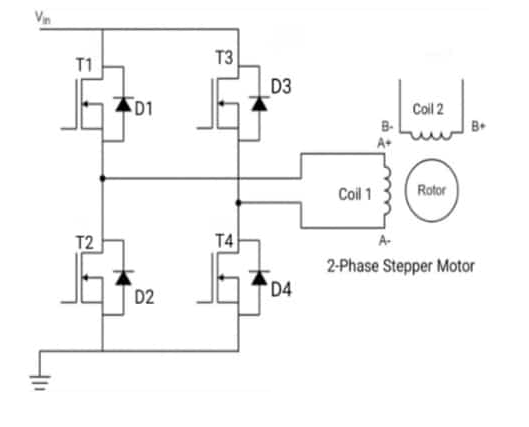
O diagrama de circuito destaca quatro transistores-chave, T1, T2, T3 e T4, dispostos em uma estrutura de ponte H.Esses MOSFETs são a espinha dorsal da operação do módulo, permitindo o fluxo bidirecional de corrente necessário para acionar o motor de passo.Além disso, o diagrama inclui diodos flyback (D1, D2, D3 e D4), que são fundamentais para proteger o circuito dos picos de tensão causados pela carga indutiva do motor.Esses diodos impedem a sobrecorrente e os danos a componentes sensíveis durante a operação.Os terminais A+, A-, B+e B são usados para conectar o motor, garantindo um movimento preciso e controlado do eixo do motor.
Como a ponte H permite a rotação do motor?
O driver TB6600 opera através da ação coordenada dos transistores MOSFET na ponte H.Por exemplo:
• A rotação no sentido horário ocorre quando os transistores T1 e T4 são ativados, direcionando o fluxo de corrente de A+ para A-.
• A rotação no sentido anti-horário ocorre quando T2 e T3 são engajados, revertendo o fluxo de corrente de A- para A+.
Essa ativação alternada dos transistores garante movimento bidirecional suave.Para alcançar o torque ideal e a operação eficiente, são essenciais o tempo preciso e a regulação de tensão.
Modos de operação para controle versátil
O TB6600 suporta quatro modos de operação distintos, cada um projetado para equilibrar o torque, a precisão e o tamanho da etapa, dependendo dos requisitos do aplicativo:
• Modo de onda: Nesse modo, apenas uma bobina é energizada por vez.A ativação de uma bobina única gira o motor em 90 graus em uma direção enquanto reverte a corrente gira na direção oposta.Ao alternar entre as bobinas, o motor alcança operação contínua.Este modo é simples, mas fornece menos torque em comparação com outros modos.
• Modo de etapa inteira: Ambas as bobinas são energizadas simultaneamente nesse modo, gerando um campo magnético mais forte.Isso resulta em aumento do torque, tornando -o ideal para aplicações que exigem mais energia e estabilidade.
• Modo de meia etapa: Uma combinação de modo de onda e modo de etapa inteira, esse modo alterna entre energizar uma única bobina e as duas bobinas.Reduz efetivamente o tamanho da etapa para 45 graus, fornecendo um equilíbrio entre precisão e torque.No entanto, o torque pode variar dependendo se uma ou ambas as bobinas são energizadas durante uma etapa específica.
• Modo microstep : O mais preciso de todos os modos, o modo Microstep reduz ainda mais o tamanho da etapa, modulando cuidadosamente a corrente através das fases do motor.Isso é alcançado usando circuitos avançados para criar transições suaves e graduais entre as etapas.Esse modo é ideal para aplicações que requerem alta precisão e torque consistente, como máquinas CNC ou robótica.
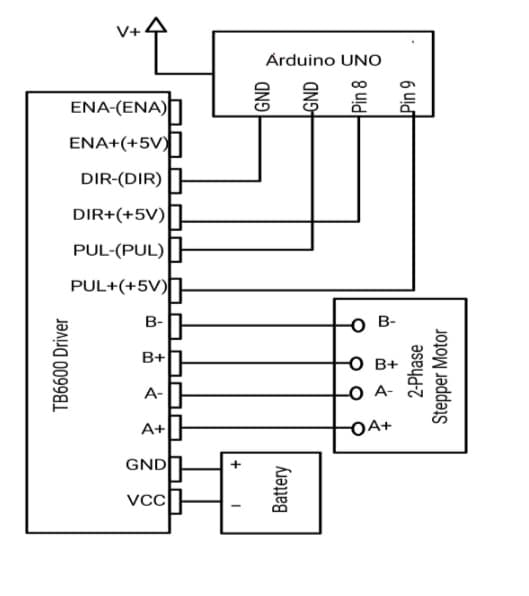
Integração do TB6600 com Arduino Uno
O controle eficiente de motores de passo exige uma combinação de hardware confiável e software cuidadosamente programado.O motorista do motor de passo do TB6600 se destaca como uma excelente ferramenta para operar os motores de passo em duas fases.Ele suporta vários modos operacionais, como onda, etapa completa, meio passo e micro-passo.Suas características de proteção integrada-incluindo salvaguardas contra baixa tensão, sobrecorrente e superaquecimento-fazem uma escolha sólida para projetos que exigem precisão e durabilidade.
Para configurar o TB6600 com um Arduino UNO, junte os seguintes componentes:
• Arduino Uno R3
• TB6600 Driver de motor de passo (versão 4A)
• Motor de passo (com uma classificação recomendada de 1,65a)
• Fonte de alimentação confiável (por exemplo, uma bateria ou fonte de energia CC regulada)
• fios de jumper
• Arduino IDE instalado em seu computador
Para integrar o TB6600 ao Arduino, siga estas instruções detalhadas
Conecte a direção e os sinais de pulso
• Ligue os terminais DIR+ e PUL+ no TB6600 aos pinos 8 e 9 do Arduino, respectivamente.Esses pinos enviam sinais de direção e pulso.
• Prenda os terminais diretos e pulsados ao pino do solo (GND) do Arduino.
• Conecte o motor ao TB6600: conecte os fios do motor de passo aos terminais TB6600.
• A+ e A- para uma bobina do motor.
• B+ e B- para a outra bobina.
• Power o driver TB6600: conecte os pinos VCC e GND no TB6600 à sua fonte de alimentação.Verifique se a tensão corresponde aos requisitos do seu motor e motorista para evitar danos.
Ajustando a resolução do microstep
O TB6600 permite que você ajuste a precisão do movimento do motor de passo usando os interruptores SW1 e SW2.Ajuste esses interruptores da seguinte forma:
• Resolução da etapa: defina o SW1 e o SW2 OFF.
• Resolução da etapa: defina o SW1 e o SW2 ligado.
• Resolução de 1/32 etapa: defina SW1 e SW2.
• Modo de etapa completa: defina SW1 e SW2.
Tabela de verdade
|
SW2 |
Resolução Microstep |
|
DESLIGADO |
1/32 Etapa |
|
SOBRE |
1/8 Etapa |
|
DESLIGADO |
1/4 passo |
|
SOBRE |
Etapa completa |
Os ajustes de comutador permitem otimizar o equilíbrio entre precisão e velocidade com base nas necessidades do seu projeto.
Para garantir que seu motor opere dentro dos limites de corrente seguros, o TB6600 possui interruptores adicionais (SW4 e SW6) para ajustar o fluxo de corrente.Essas configurações são úteis para:
• Prevenção de danos de sobrecarga.
• Mantendo o desempenho do motor consistente.
• Sempre verifique se a corrente do motor permanece abaixo do máximo do driver de 4A para proteger os dois componentes.
• Controle direção do motor: se você deseja que o motor gire o sentido anti -horário, modifique o estado do pino Dir+ no seu código Arduino.
• Teste e solução de problemas: Após concluir a configuração, faça o upload de um esboço básico de controle do motor de passo para verificar a fiação e a funcionalidade do driver.
• Evite superaquecimento: verifique se a ventilação adequada para o driver TB6600, especialmente em aplicações de alta corrente.
Aplicações
O módulo TB6600 desempenha um papel ativo em vários setores onde o controle motor meticuloso é usado.Sua adaptabilidade brilha em várias implementações que destacam seus recursos exclusivos:
Posicionamento da antena
No campo das telecomunicações, alcançar o alinhamento ideal da antena é obrigatório para a recepção e transmissão do sinal de qualidade.O TB6600 facilita o movimento de precisão, aumentando assim a eficácia dos sistemas de comunicação.
Gerenciamento do motor de passo
Na automação e na robótica, o manuseio preciso do motor de passo é alcançado através do TB6600, permitindo refinar a precisão do movimento e reforçar a confiabilidade do sistema.
Operações do CNC
Para máquinas de controle numérico de computador (CNC), o TB6600 aprimora processos complexos de corte e moagem, permitindo que você mantenha altos níveis de precisão e precisão repetível em seu trabalho.
Precisão de impressão 3D
Na fabricação aditiva, especialmente na impressão 3D, o TB6600 oferece controle de motor detalhado, suportando o posicionamento preciso das cabeças de impressão necessárias para a criação de formas e formas complexas.
Controle do motor complexo
O módulo é valioso para tarefas intrincadas de controle motor em sistemas de automação complexos, aumentando a eficiência e permitindo o gerenciamento refinado.
Controle da velocidade, posição e rotação
O TB6600 se destaca em cenários que exigem velocidade exata e controle rotacional, usado principalmente para otimizar o desempenho em ambientes em constante mudança.
Dispositivos de imagem e sistemas bancários
O módulo suporta a operação confiável de câmeras e caixas eletrônicos, garantindo movimentos motores suaves e exatos, que estende a vida útil operacional dos dispositivos.
Precisão em dispositivos de gravação
Para ferramentas e máquinas de gravação, o TB6600 fornece o controle preciso necessário para a execução de projetos finamente detalhados, um fator perigoso nas indústrias onde a precisão e os detalhes são dominantes.
Sobre Nós
ALLELCO LIMITED
Consulte Mais informação
Inquérito rápido.
Por favor, envie uma consulta, responderemos imediatamente.
perguntas frequentes [FAQ]
1. Que fonte de alimentação devo usar para o driver TB6600?
O motorista do motor de passo do TB6600 trabalha com uma tensão de fonte de alimentação entre 8V e 45V.
2. Como posso controlar a velocidade do motor de passo com o TB6600?
O TB6600 usa modulação de largura de pulso (PWM) para ajustar a velocidade do motor.Você pode alterar a velocidade modificando a frequência PWM.
3. O TB6600 pode suportar motores de passo de alta corrente?
Sim, o TB6600 pode lidar com até 4.5A, tornando -o compatível com os motores de passo avaliados com essa corrente.
4. Como faço para reverter a direção do motor usando o TB6600?
Para reverter a direção do motor, alterne a sequência do sinal de entrada nos pinos de controle (por exemplo, IN1-In2-In3-In4 para Forward, IN4-In2-In2-In1 para reverso).
5. Posso conectar um motor de passo com mais de 4 fios ao TB6600?
O TB6600 é feito para motores de passo de 4 fios.Se o seu motor tiver mais de 4 fios, você precisará de um driver diferente.
6. O TB6600 é compatível com um motor de passo NEMA23?
O TB6600 funciona bem com os motores NEMA17, mas geralmente é inadequado para os motores NEMA23 devido aos seus requisitos atuais mais altos.

Um guia completo para o sensor IR ajustável E18-D80NK
em 12/12/2024
DS3231 Módulo RTC explicado: Diagrama de pinos, especificações e interface do microcontrolador
em 12/12/2024
Postagens populares
-

Computadores de conjunto de instruções complexos: como eles mudaram de computação?
em 18/04/8000 147757
-

Pinagem e recursos USB-C
em 18/04/2000 111931
-

Usando o Xilinx Unified Simulation Primitives: um guia abrangente para design e simulação do FPGA
em 18/04/1600 111349
-

Tensões de fonte de alimentação em eletrônica: significado de VCC, VDD, VEE, VSS e GND
em 18/04/0400 83719
-

Guia do conector RJ45: pinagem, fiação, tipos de cabos e usos
em 01/01/1970 79508
-

O guia final para os códigos de cores de arame em sistemas elétricos modernos
A maneira como nossos sistemas elétricos usam cores não é apenas para a aparência.Cada cor do fio agora indica uma função específica, facilitando a identificação e manuseio componentes elétricos co...em 01/01/1970 66888
-

Fator de qualidade (Q): equações e aplicações
O fator de qualidade, ou 'q', é importante ao verificar como os indutores e ressonadores trabalham em sistemas eletrônicos que usam frequências de rádio (RF).'Q' mede o quão bem um circuito minimiz...em 01/01/1970 63010
-

Guia da válvula de purga: função, sintomas, teste e substituição para o desempenho ideal do motor
A válvula de purga é uma parte essencial do sistema de um carro que ajuda a manter o ar limpo, gerenciando vapores de combustível antes que eles possam escapar da atmosfera.Isso não apenas ajuda o ...em 01/01/1970 62985
-

Alcançando o desempenho máximo com o teorema máximo de transferência de energia
O teorema da transferência de energia máxima explica como a energia de uma fonte, como uma bateria ou gerador, flui para uma carga conectada.Ele mostra a condição exata em que a carga recebe mais e...em 01/01/1970 54081
-

A23 Especificações da bateria e compatibilidade
A bateria A23 é uma pequena bateria em forma de cilindro com alta tensão.Também chamado 23A, 23AE, ou MN21, funciona a 12 volts e muito mais alto que as baterias AA ou AAA.Seu design espec...em 01/01/1970 52111
Número da peça quente
-

C8051T606-ZMR
Silicon Labs
IC MCU 8BIT 1.5KB OTP 10QFN
MCF51AC256BCLKE
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 80LQFP
R5F101LCAFB#30
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 64LQFP
TSC102IPT
STMicroelectronics
IC CURR SENSE 1 CIRCUIT 8TSSOP
AD8004ARZ-14-REEL7
Analog Devices Inc.
IC OPAMP CFA 4 CIRCUIT 14SOIC
170M2109
Eaton - Bussmann Electrical Division
FUSE SQUARE 160A 1.2KV RECT
CSTLS8M00G56-B0
Murata Electronics
CERAMIC RES 8.0000MHZ 47PF T/H
PIC18F23K22-I/SP
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SPDIP
MIC5301-3.0YD5
Micrel Inc.
IC REG LINEAR 3V 150MA TSOT23-5
SPMWHT541ML5XAWMS5
Samsung Semiconductor, Inc.
LED LM561C WARM WHT 2700K 4SMD
DAC7551TDRNRQ1
Texas Instruments
IC DAC 12BIT V-OUT 12USON
WP7113GD
Kingbright
LED GREEN DIFFUSED T-1 3/4 T/H
XC7V585T-2FFG1761I
AMD
IC FPGA 850 I/O 1761FCBGA
LQW15AN51NJ00D
Murata Electronics
FIXED IND 51NH 210MA 1.08OHM SMD
NZL5V6ATT1
onsemi
TVS DIODE 3VWM 9.97V SC75 SOT416
MC100EPT20DT
onsemi
IC XLATOR TTL/CMOS-PECL 8TSSOP
C1608C0G1H080C080AA
TDK Corporation
CAP CER 8PF 50V C0G 0603
AD8674ARUZ
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14TSSOP -

LT6703IDC-2#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR 3DFN
AD5755ACPZ
Analog Devices Inc.
IC DAC 16BIT V/A-OUT 64LFCSP
EPM7160SQC160-6
Intel
IC CPLD 160MC 6NS 160QFP
MAX158BEWI+
Analog Devices Inc./Maxim Integrated
IC ADC 8BIT 8CH W/MUX&REF 28SOIC
SA605D/01
NXP USA Inc.
AUDIO SINGLE CHIP RECEIVER
SLG7NT4229V
Renesas Design Germany GmbH
CMIC, PWROK GENERATOR AND STARTU
170M4410
Eaton - Bussmann Electrical Division
FUSE SQUARE 315A 700VAC RECT
STTH5L06FP
STMicroelectronics
DIODE GEN PURP 600V 5A TO220FPAC
1812SC103KAT1A\SB
KYOCERA AVX
CAP CER 10000PF 1.5KV X7R 1812
HEDS-9710#R50
Broadcom Limited
ROTARY ENCODR OPTICAL 200 LPI
MAX825ZEXK
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU
T491C106K025AT7280
KEMET
CAP TANT 10UF 10% 25V 2312
LT1719IS6#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR TSOT23-6
VI-J54-CX
Vicor Corporation
DC DC CONVERTER 48V 75W
TPS73433TDDCRQ1
Texas Instruments
IC REG LINEAR 3.3V 250MA SOT23-5
ICL7107SCPL
Renesas Electronics America Inc
IC DISPLAY DRIVER 3.5DIGIT 40DIP
H11D2SD
onsemi
OPTOISO 5.3KV TRANS W/BASE 6SMD
ZVP2120GTA
Diodes Incorporated
MOSFET P-CH 200V 200MA SOT223 -

MAX3378EEBC+T
Analog Devices Inc./Maxim Integrated
IC TRANSLTR BIDIRECTIONAL 12UCSP
VI-812076B
Vicor Corporation
M 18/36/24 48V/ 4.17A
DAC43701DSGR
Texas Instruments
IC DAC 8BIT V-OUT 8WSON
S-80846CNUA-B87T2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT89-3
0402ZC471JAT2A
KYOCERA AVX
CAP CER 470PF 10V X7R 0402
TPS22976NDPUR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 14WSON
MTFDDAV256TBN-1AR1ZABYY
Micron Technology Inc.
SSD 256GB M.2 TLC SATA III 3.3V
FDC8886
onsemi
MOSFET N-CH 30V 6.5/8A SUPERSOT6
1812AC222JAT1A
KYOCERA AVX
CAP CER 2200PF 1KV X7R 1812
M4T32-BR12SH6
STMicroelectronics
SNAPHAT BATT/CRYSTAL FOR SOIC
SIHG47N60AEF-GE3
Vishay Siliconix
MOSFET N-CH 600V 40A TO247AC
SR295E104MARTR1
KYOCERA AVX
CAP CER 0.1UF 50V Z5U RADIAL
P6KE56CA
Littelfuse Inc.
TVS DIODE 47.8VWM 77VC DO204AC
ADP2102YCPZ-1.2-R7
Analog Devices Inc.
IC REG BUCK 1.2V 600MA 8LFCSP
IRFZ34NSTRLPBF
Infineon Technologies
MOSFET N-CH 55V 29A D2PAK
MAX5105EEP+T
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 20QSOP
ST72F623F2M1
STMicroelectronics
IC MCU 8BIT 8KB FLASH 20SOIC
XRT91L80IB-F
MaxLinear, Inc.
IC TRANSCEIVER FULL 196STBGA