Compreendendo os problemas de energia de inicialização do LPC84x e a sequência completa de inicialização
Os microcontroladores LPC84x são amplamente utilizados em sistemas embarcados porque combinam poder de processamento, memória e periféricos em um dispositivo compacto.Para garantir uma operação confiável, você precisa entender como o microcontrolador é inicializado e como as condições de energia afetam seu comportamento.Este artigo explica os principais recursos e arquitetura dos microcontroladores LPC84x, juntamente com seus requisitos de fonte de alimentação, mecanismos de reinicialização e sequência de inicialização.Ele também discute problemas comuns de energia de inicialização e maneiras práticas de solucioná-los.Catálogo

Figura 1. Microcontrolador LPC84x
Visão geral dos problemas de energia de inicialização do LPC84x
Os microcontroladores LPC84x são amplamente utilizados em sistemas embarcados porque combinam capacidade de processamento, memória e periféricos em um dispositivo compacto e com baixo consumo de energia.No entanto, a operação confiável depende muito de um processo de inicialização estável e bem controlado.Durante a inicialização, problemas como tensão de alimentação instável, taxa de rampa de tensão inadequada ou condições de reinicialização inconsistentes podem afetar a forma como o microcontrolador é inicializado.Essas condições podem impedir que o dispositivo atinja a operação normal ou atrasar a inicialização do sistema.
Recursos dos microcontroladores LPC84x
1. Núcleo ARM Cortex-M0+
A série LPC84x é construída em torno do processador ARM Cortex-M0+, que é otimizado para baixo consumo de energia e desempenho eficiente.Este núcleo de 32 bits suporta tratamento rápido de interrupções e execução determinística, tornando-o adequado para aplicações incorporadas.Sua arquitetura simples permite construir firmware compacto enquanto mantém capacidades de processamento confiáveis.O núcleo também suporta ferramentas de desenvolvimento ARM padrão para facilitar a programação e depuração.
2. Memória Flash Incorporada
Esses microcontroladores incluem memória flash no chip usada para armazenar código de programa e firmware.O flash interno normalmente fornece espaço suficiente para aplicativos incorporados sem a necessidade de dispositivos de memória externos.O flash integrado permite acesso mais rápido às instruções e melhora a eficiência geral do sistema.Também simplifica o projeto de hardware porque o microcontrolador pode operar de forma independente após a programação.
3. Memória SRAM
A família LPC84x integra SRAM interna para armazenamento de dados em tempo de execução e operações de pilha.Esta memória permite acesso rápido a variáveis, buffers e dados de processamento temporário.SRAM rápido melhora a velocidade de execução porque a CPU pode acessar dados sem esperar pela memória externa.Ele também oferece suporte a operações multitarefa em aplicativos incorporados.
4. Interfaces de comunicação serial flexíveis
Vários periféricos de comunicação estão disponíveis para conectar dispositivos e módulos externos.Isso inclui interfaces UART para comunicação serial, interfaces SPI para comunicação periférica de alta velocidade e interfaces I²C para redes de sensores e controle.Esses blocos de comunicação integrados simplificam a integração de hardware em projetos embarcados.Ele pode ser usado para conectar monitores, sensores, dispositivos de memória e outros componentes digitais.
5. Suporte Periférico Analógico
Os microcontroladores LPC84x incluem recursos analógicos integrados, como um conversor analógico para digital (ADC) de 12 bits.Isto permite que o dispositivo meça sinais analógicos de sensores ou circuitos externos.Algumas variantes também incluem a funcionalidade de conversor digital para analógico (DAC) para gerar saídas analógicas.Esses recursos permitem que o microcontrolador faça interface diretamente com os sinais.
6. Configuração flexível de E/S
Os pinos de entrada/saída de uso geral (GPIO) permitem que o microcontrolador interaja com componentes de hardware externos.O LPC84x inclui recursos flexíveis de configuração de pinos que permitem que múltiplas funções sejam atribuídas a um único pino.Essa flexibilidade ajuda a otimizar os layouts de PCB e maximizar os periféricos disponíveis.Os pinos GPIO podem ser configurados para entrada digital, saída ou funções periféricas alternativas.
7. Modos de operação de baixo consumo de energia
Modos de baixo consumo de energia estão incluídos para reduzir o consumo de energia em aplicações alimentadas por bateria.Esses modos permitem que o microcontrolador desabilite periféricos não utilizados ou reduza a frequência do clock do sistema durante períodos ociosos.Os recursos de gerenciamento de energia ajudam a prolongar a vida útil da bateria em dispositivos portáteis.O sistema pode retornar rapidamente à operação ativa quando necessário.
8. Módulos integrados de temporizador e controle
Vários módulos de temporizador são integrados para suportar medição de tempo, geração de sinal e controle de eventos.Isso inclui temporizadores de múltiplas taxas, temporizadores configuráveis de estado e temporizadores de vigilância.Os temporizadores permitem o controle preciso do tempo em sistemas embarcados, como controle de motor, temporização de comunicação ou agendamento de tarefas periódicas.Esses módulos melhoram a confiabilidade e o desempenho do sistema.
Visão geral do diagrama de blocos LPC84x
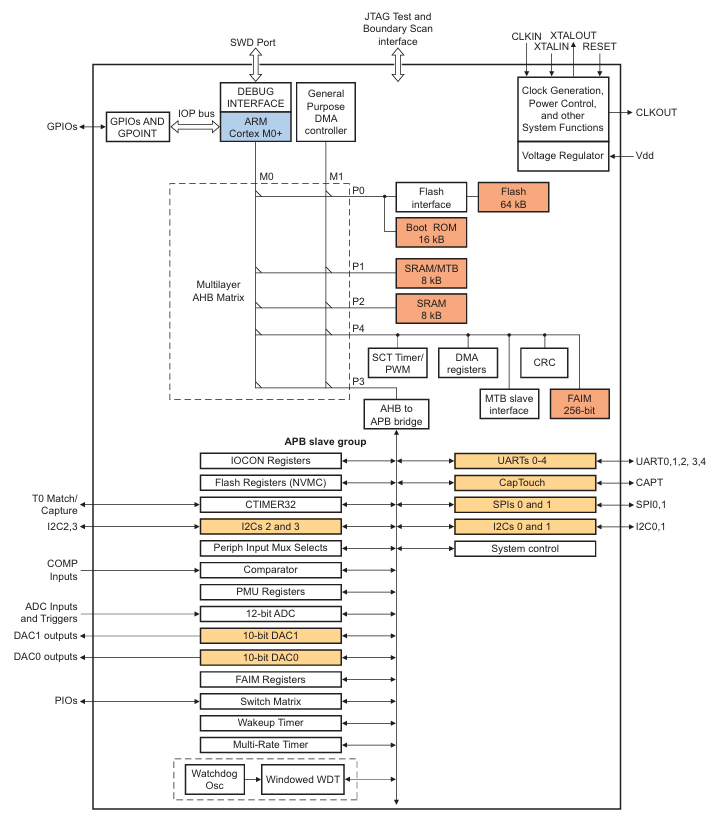
Figura 2. Diagrama de blocos do microcontrolador LPC84x
A arquitetura LPC84x integra vários blocos funcionais que trabalham juntos para executar tarefas de processamento embarcadas.No centro do sistema está a CPU ARM Cortex-M0+, que executa instruções do programa armazenadas na memória flash interna enquanto acessa dados da SRAM.Uma matriz de barramento AHB multicamadas conecta o processador com módulos de memória e interfaces periféricas, permitindo comunicação eficiente entre componentes internos.Os blocos de geração de relógio e gerenciamento de energia controlam o tempo do sistema e garantem a operação estável do dispositivo em diferentes modos de desempenho.Interfaces de depuração como SWD permitem programar e testar firmware durante o desenvolvimento.Vários periféricos, incluindo temporizadores, módulos de comunicação e interfaces analógicas, são conectados através do sistema de barramento interno para fornecer interação com dispositivos externos.Juntos, esses blocos formam uma arquitetura compacta de microcontrolador projetada para controle embarcado eficiente.
Requisitos de fonte de alimentação LPC84x
|
Parâmetro |
Símbolo |
Típico / Faixa |
|
Tensão de alimentação |
VDD |
1,8 V – 3,6 V |
|
Tensão de alimentação analógica |
VDDA |
1,8 V – 3,6 V |
|
Tensão operacional (típica) |
VDD |
3,3V |
|
Limite de tensão de inicialização |
VPOR |
~1,5 V (típico) |
|
Nível de tensão de queda |
VBOR |
Configurável (~1,7–2,7 V) |
|
Corrente do modo ativo |
DDI |
Dependente do dispositivo |
|
Corrente de sono profundo |
DDI(DS) |
Muito baixo (faixa µA) |
|
Tensão GPIO máxima |
VIO |
Até VDD |
|
Faixa de temperatura operacional |
TA |
−40°C a +105°C |
|
Capacitor de desacoplamento recomendado |
- |
0,1 µF perto de cada pino VDD |
Fontes de reinicialização e comportamento de inicialização do LPC84x
Redefinição de inicialização (POR)
Power-On Reset (POR) é um mecanismo de reinicialização interno que é ativado automaticamente quando a energia é aplicada pela primeira vez ao microcontrolador LPC84x.Seu principal objetivo é manter o sistema em estado de reinicialização até que a tensão de alimentação atinja um nível operacional seguro.Quando o dispositivo é ligado, o circuito POR monitora a tensão de alimentação e evita que a CPU execute instruções prematuramente.Assim que a tensão se estabilizar, a condição de reinicialização é liberada e o processador começa a executar o código da memória flash interna.Isso garante que o microcontrolador sempre inicie em um estado previsível após a alimentação ser aplicada.Na arquitetura interna, o sistema de reinicialização interage com os blocos de relógio e gerenciamento de energia antes do início da operação normal.Este mecanismo constitui a base do processo de inicialização do LPC84x.
Reinicialização de Brown-Out (BOR)
Brown-Out Reset (BOR) é um mecanismo de proteção que reinicia o microcontrolador LPC84x quando a tensão de alimentação cai abaixo de um limite operacional seguro.Sua finalidade é evitar que a CPU opere sob condições de tensão instáveis que possam causar comportamento imprevisível.Quando a tensão cai abaixo do nível configurado, o circuito BOR aciona uma reinicialização do sistema para proteger a memória e os estados periféricos.Após a tensão de alimentação retornar a um nível estável, o dispositivo reinicia normalmente.Esse recurso ajuda a manter uma operação confiável em sistemas onde podem ocorrer flutuações de energia.Na arquitetura interna, os circuitos de monitoramento de tensão funcionam juntamente com o bloco de controle de potência para detectar condições de baixa tensão.Como resultado, o microcontrolador pode se recuperar com segurança de quedas temporárias de tensão.
Pino de reinicialização externa (RESET)
O pino RESET externo fornece um método de hardware para redefinir o microcontrolador LPC84x de fora do chip.Ele permite que dispositivos externos ou sinais de controle forcem o microcontrolador a um estado de reinicialização quando necessário.Quando o sinal RESET se torna ativo, o processador para de executar as instruções e retorna à condição inicial de inicialização.Isso garante que o sistema possa reiniciar corretamente durante determinados eventos operacionais.Após o sinal de reset ser liberado, o dispositivo executa seu processo de inicialização interna antes de executar o firmware novamente.O controle de reinicialização externo é frequentemente usado durante a programação, depuração ou supervisão do sistema.Dentro da estrutura interna do sistema, esse caminho de reinicialização se conecta diretamente ao controlador central de reinicialização.
Redefinição do cão de guarda
Uma reinicialização do watchdog ocorre quando o temporizador do watchdog detecta que o software do sistema não está mais funcionando corretamente.O temporizador watchdog monitora continuamente a execução do programa, exigindo atualizações periódicas do firmware em execução.Se o software não atualizar o cronômetro dentro do período esperado, o cronômetro expirará e acionará uma reinicialização do sistema.Este mecanismo protege o sistema contra falhas de software, loops infinitos ou falhas inesperadas de firmware.Após a reinicialização, o microcontrolador reinicia e começa a executar o programa novamente.Na arquitetura interna, o temporizador watchdog opera juntamente com a lógica de controle do sistema e os temporizadores.Seu objetivo é melhorar a confiabilidade geral do sistema e manter a operação contínua em sistemas embarcados.
Sequência de inicialização do LPC84x
1. Estabilização da fonte de alimentação
Quando a tensão é aplicada pela primeira vez ao dispositivo, os circuitos internos requerem um curto período para que a tensão de alimentação se estabilize.Durante esta fase, os reguladores internos e blocos de gerenciamento de energia estabelecem níveis de tensão adequados para a CPU e periféricos.O microcontrolador permanece inativo enquanto ocorre esta estabilização.Isso evita comportamento não confiável durante o estágio inicial de inicialização.A tensão estável garante que os circuitos lógicos internos possam operar corretamente.
2. Ativação de reinicialização ao ligar
Depois que a fonte começa a se estabilizar, o circuito Power-On Reset mantém o processador em um estado de reinicialização.Este reset evita que a CPU execute instruções até que a tensão atinja um nível seguro.O controlador de reinicialização monitora a tensão de alimentação continuamente durante este estágio.Somente quando a tensão excede o limite exigido o reset começa a ser liberado.Isto garante que o microcontrolador inicie com um estado de sistema limpo.
3. Inicialização do relógio interno
Assim que as condições de reinicialização forem eliminadas, o microcontrolador inicializa seu sistema de relógio interno.O gerador de clock inicia o oscilador interno, que fornece temporização para operações de CPU e periféricos.Este relógio se torna a principal referência de tempo para a execução do sistema.O processador não pode executar instruções sem uma fonte de clock estável.Portanto, a inicialização do relógio é uma etapa importante da inicialização do sistema.
4. Inicialização de memória
Durante a próxima etapa, o processador prepara as estruturas de memória interna utilizadas pelo programa.A memória flash fornece as instruções do firmware, enquanto a SRAM armazena os dados de tempo de execução.O sistema também prepara a tabela de vetores usada para tratamento de interrupções.Esta configuração de memória permite que o processador localize corretamente o ponto de entrada do programa.A inicialização adequada da memória garante uma execução suave do firmware.
5. Inicialização Periférica
Após a preparação da memória, o sistema habilita periféricos internos importantes.Esses periféricos podem incluir temporizadores, módulos de comunicação e registros de controle exigidos pelo firmware.Alguns periféricos permanecem desativados até que o software aplicativo os ative.O estágio de inicialização garante que o ambiente básico do sistema esteja pronto.Esta etapa prepara o dispositivo para a execução do aplicativo.
6. Começa a execução do firmware
Assim que todas as etapas de inicialização interna forem concluídas, o processador começa a executar o firmware armazenado na memória flash.A execução normalmente começa a partir do vetor de redefinição definido no código do programa.A partir deste ponto, o aplicativo incorporado controla a operação do sistema.O firmware configura periféricos, processa sinais de entrada e executa tarefas do sistema.Isso marca a transição da inicialização do hardware para o tempo de execução do aplicativo.
Problemas comuns de energia de inicialização do LPC84x
• Rampa de tensão lenta durante a inicialização
Se a tensão de alimentação aumentar muito lentamente, os circuitos de reinicialização internos poderão se comportar de maneira imprevisível.Uma taxa de rampa lenta pode atrasar a liberação adequada da reinicialização e afetar a inicialização do dispositivo.Em alguns sistemas, a CPU pode tentar iniciar antes que a tensão esteja totalmente estável.Isso pode resultar em comportamento de inicialização inconsistente.
• Ruído ou instabilidade na fonte de alimentação
Ruído elétrico na linha de alimentação pode interferir na inicialização estável do microcontrolador.O ruído pode causar quedas temporárias de tensão que provocam reinicializações não intencionais.Essas flutuações podem afetar o relógio interno e os circuitos lógicos.Como resultado, o microcontrolador pode reiniciar repetidamente.
• Capacitores de desacoplamento insuficientes
O desacoplamento deficiente próximo aos pinos de alimentação do microcontrolador pode causar tensão instável durante a inicialização.Mudanças rápidas de corrente dentro do chip exigem capacitores próximos para estabilizar o fornecimento.Sem o desacoplamento adequado, podem ocorrer picos de tensão.Essa instabilidade pode afetar a inicialização do sistema.
• Quedas de tensão durante a inicialização
Se a fonte de alimentação não puder fornecer corrente suficiente na inicialização, a tensão poderá cair brevemente.Esta situação pode desencadear condições de reinicialização de queda de energia.Essas quedas podem ocorrer quando outros componentes do sistema iniciam simultaneamente.Essas quedas temporárias podem interromper o processo de inicialização.
•Redefinir a instabilidade do sinal
Sinais de reinicialização externos que flutuam durante a inicialização podem causar reinicializações repetidas.Se o sinal de reset não permanecer estável, o microcontrolador poderá nunca completar sua inicialização.Isso pode impedir que o firmware seja executado normalmente.Condições de reinicialização estáveis são necessárias para uma inicialização confiável.
• Disponibilidade inadequada da fonte do relógio
Se o sistema depende de uma fonte de relógio externa que não inicia corretamente, a CPU pode não funcionar corretamente.Sem um sinal de clock estável, a execução da instrução não pode começar.Isso pode fazer com que o sistema pareça não responder.A estabilidade do clock é importante para a inicialização normal do microcontrolador.
Solução de problemas de inicialização do LPC84x
• Verifique a estabilidade da tensão de alimentação
A primeira etapa da solução de problemas é medir a tensão de alimentação do microcontrolador usando um osciloscópio ou multímetro.A tensão deve permanecer dentro da faixa operacional recomendada durante a inicialização.Quaisquer quedas ou picos repentinos podem indicar instabilidade na fonte de alimentação.Observar a forma de onda da tensão durante a inicialização pode revelar problemas ocultos.A tensão estável é importante para uma inicialização confiável do microcontrolador.
• Verifique o tempo do sinal de redefinição
O sinal de reinicialização deve permanecer estável e devidamente sincronizado com o processo de inicialização.Muitas vezes monitoram o pino de redefinição para confirmar se ele se comporta conforme o esperado durante a inicialização.Um sinal de reinicialização instável ou ruidoso pode reiniciar repetidamente o sistema.A verificação do tempo de reinicialização garante que a inicialização ocorra somente depois que a energia se estabilizar.O comportamento correto de redefinição oferece suporte à inicialização adequada do sistema.
• Inspecione a filtragem da fonte de alimentação
Componentes de filtragem de energia, como capacitores de desacoplamento, devem ser examinados cuidadosamente.Esses capacitores ajudam a manter a tensão estável durante mudanças rápidas de corrente.O mau posicionamento ou a capacitância insuficiente podem permitir que o ruído de tensão afete o microcontrolador.Garantir a filtragem adequada melhora a confiabilidade da inicialização.A inspeção de hardware muitas vezes pode revelar capacitores ausentes ou colocados incorretamente.
• Confirme a operação da fonte do relógio
O relógio do sistema deve iniciar corretamente para que o processador execute as instruções.Verifique os sinais do oscilador para confirmar a operação adequada.Se a fonte do relógio falhar ao iniciar, a CPU não poderá executar o firmware.O monitoramento do sinal do relógio ajuda a determinar se os circuitos de temporização estão funcionando corretamente.A operação confiável do relógio é necessária para a inicialização normal.
• Examine o código de inicialização do firmware
O código de inicialização dentro do firmware pode afetar o comportamento de inicialização do sistema.Revise o manipulador de redefinição e as rotinas de inicialização do sistema.A configuração incorreta dos registros do sistema ou periféricos pode atrasar a operação normal.A verificação do código de inicialização garante que o firmware inicialize o hardware corretamente.A inspeção de software complementa a depuração de hardware.
• Observe o comportamento de inicialização com ferramentas de depuração
Interfaces de depuração como SWD permitem monitorar a atividade do processador durante a inicialização.Usando ferramentas de depuração, verifique se a CPU atinge o ponto de entrada principal do programa.Os pontos de interrupção e os logs de depuração ajudam a revelar onde a inicialização termina.Este método fornece informações valiosas sobre o comportamento do sistema durante os estágios iniciais de inicialização.
Conclusão
A inicialização confiável de um microcontrolador LPC84x depende de energia estável, comportamento de reinicialização correto e um sistema de relógio funcionando corretamente.Estágios importantes de inicialização incluem estabilização de energia, liberação de redefinição, configuração de relógio, preparação de memória e execução de firmware.Problemas como quedas de tensão, ruído, desacoplamento deficiente ou sinais de reinicialização instáveis podem interromper esse processo.O projeto de energia cuidadoso e a solução sistemática de problemas ajudam a garantir uma inicialização consistente e uma operação estável do sistema.
Sobre Nós
ALLELCO LIMITED
Consulte Mais informação
Inquérito rápido.
Por favor, envie uma consulta, responderemos imediatamente.
perguntas frequentes [FAQ]
1. Para que é usado o microcontrolador LPC84x?
O microcontrolador LPC84x é comumente usado em sistemas embarcados que requerem baixo consumo de energia e hardware compacto.As aplicações típicas incluem sistemas de controle industrial, interfaces de sensores, eletrônicos de consumo e dispositivos IoT.
2. Quais ferramentas de desenvolvimento podem ser usadas para programar microcontroladores LPC84x?
Você pode programar dispositivos LPC84x usando ferramentas compatíveis com ARM, como Keil MDK, MCUXpresso IDE ou IAR Embedded Workbench.Esses ambientes suportam depuração, compilação e desenvolvimento de firmware.
3. O microcontrolador LPC84x requer um oscilador de cristal externo?
Não, o LPC84x inclui um oscilador interno que pode gerar o clock do sistema.No entanto, algumas aplicações podem usar um cristal externo para maior precisão de temporização.
4. Qual é a velocidade máxima de clock dos microcontroladores LPC84x?
A maioria dos dispositivos LPC84x opera em velocidades de clock de até cerca de 30 MHz.Essa velocidade permite um processamento eficiente, mantendo baixo consumo de energia.
5. Os microcontroladores LPC84x podem ser usados em dispositivos alimentados por bateria?
Sim, os dispositivos LPC84x são projetados com vários modos de baixo consumo de energia que reduzem o consumo de energia durante períodos ociosos.Isso os torna adequados para eletrônicos portáteis, nós IoT e sistemas embarcados alimentados por bateria.

O que é uma bateria H7?Tamanho, recursos e usos do veículo
em 10/03/2026

Compreendendo os conectores DVI: tudo o que você precisa saber
em 09/03/2026
Postagens populares
-

Computadores de conjunto de instruções complexos: como eles mudaram de computação?
em 18/04/8000 147757
-

Pinagem e recursos USB-C
em 18/04/2000 111936
-

Usando o Xilinx Unified Simulation Primitives: um guia abrangente para design e simulação do FPGA
em 18/04/1600 111349
-

Tensões de fonte de alimentação em eletrônica: significado de VCC, VDD, VEE, VSS e GND
em 18/04/0400 83721
-

Guia do conector RJ45: pinagem, fiação, tipos de cabos e usos
em 01/01/1970 79508
-

O guia final para os códigos de cores de arame em sistemas elétricos modernos
A maneira como nossos sistemas elétricos usam cores não é apenas para a aparência.Cada cor do fio agora indica uma função específica, facilitando a identificação e manuseio componentes elétricos co...em 01/01/1970 66907
-

Guia da válvula de purga: função, sintomas, teste e substituição para o desempenho ideal do motor
A válvula de purga é uma parte essencial do sistema de um carro que ajuda a manter o ar limpo, gerenciando vapores de combustível antes que eles possam escapar da atmosfera.Isso não apenas ajuda o ...em 01/01/1970 63037
-

Fator de qualidade (Q): equações e aplicações
O fator de qualidade, ou 'q', é importante ao verificar como os indutores e ressonadores trabalham em sistemas eletrônicos que usam frequências de rádio (RF).'Q' mede o quão bem um circuito minimiz...em 01/01/1970 63012
-

Alcançando o desempenho máximo com o teorema máximo de transferência de energia
O teorema da transferência de energia máxima explica como a energia de uma fonte, como uma bateria ou gerador, flui para uma carga conectada.Ele mostra a condição exata em que a carga recebe mais e...em 01/01/1970 54081
-

A23 Especificações da bateria e compatibilidade
A bateria A23 é uma pequena bateria em forma de cilindro com alta tensão.Também chamado 23A, 23AE, ou MN21, funciona a 12 volts e muito mais alto que as baterias AA ou AAA.Seu design espec...em 01/01/1970 52125
Número da peça quente
-

IRFD9024
Vishay Siliconix
MOSFET P-CH 60V 1.6A 4DIP
MAX6727KASDD3+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU SOT23-8
MAX4606ESE+
Analog Devices Inc./Maxim Integrated
IC SW SPST-NO/NCX4 4OHM 16SOIC
MPC8347CVVAJDB
NXP USA Inc.
IC MPU MPC83XX 533MHZ 672TBGA
R3116N101A-TR-FE
Nisshinbo Micro Devices Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5
M20-7810845R
Harwin Inc.
CONN RCPT 16POS 0.1 GOLD SMD
PIC16F872T-I/SS
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 28SSOP
TLV379IDCKR
Texas Instruments
IC OPAMP GP 1 CIRCUIT SC70-5
SN74HC132PWR
Texas Instruments
IC GATE NAND 4CH 2-INP 14TSSOP
PS2503-2
CEL
OPTOISOLATOR 5KV 2CH TRANS 8DIP
06033A180JAT2A
AVX Corporation
CAP CER 18PF 25V C0G/NP0 0603
DMN2011UTS-13
Diodes Incorporated
MOSFET N-CH 20V 21A 8TSSOP
MC78L05ABDG
onsemi
IC REG LINEAR 5V 100MA 8SOIC
ADF4360-8BCPZRL7
Analog Devices Inc.
IC FANOUT DIST 24LFCSP
CG0402MLA-5.5MG
Bourns Inc.
VARISTOR 8V 20A 0402
GRM1555C2A8R0CA01J
Murata Electronics
CAP CER 8PF 100V C0G/NP0 0402
AON7700
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 30V 16A/40A 8DFN
STMP3780XXBBEA5N
NXP USA Inc.
STMP3780XXBBEA5N -

PCM1680DBQ
Texas Instruments
IC DAC/AUDIO 24BIT 192K 28SSOP
RT0805BRE07143RL
YAGEO
RES SMD 143 OHM 0.1% 1/8W 0805
SS14MHRSG
Taiwan Semiconductor Corporation
DIODE SCHOTTKY 40V 1A MICRO SMA
AD9517-0ABCPZ-RL7
Analog Devices Inc.
IC CLOCK GENERATOR 48LFCSP
IHLP5050FDER1R0M5A
Vishay Dale
FIXED IND 1UH 40A 1.77 MOHM SMD
LTM9006CY-14#PBF
Analog Devices Inc.
IC ADC 14BIT PIPELINED 140BGA
JAN1N3891
Microchip Technology
DIODE GEN PURP 200V 12A DO203AA
C0603CH1E330K030BA
TDK Corporation
CAP CER 33PF 25V CH 0201
IXFT60N50P3
IXYS
MOSFET N-CH 500V 60A TO268
AP7335-33SNG-7
Diodes Incorporated
IC REG LIN 3.3V 300MA 6DFN2020
CC0201MRX5R4BB474
YAGEO
CAP CER 0.47UF 4V X5R 0201
EPM7128SQC160-7F
Intel
IC CPLD 128MC 7.5NS 160QFP
RT0805DRE07475RL
YAGEO
RES SMD 475 OHM 0.5% 1/8W 0805
TJA1044GTKZ
NXP USA Inc.
IC TRANSCEIVER HALF 1/1 8HVSON
PBSS2540MB,315
Nexperia USA Inc.
TRANS NPN 40V 0.5A DFN1006B-3
06035C152MAT2A
KYOCERA AVX
CAP CER 1500PF 50V X7R 0603
PVT312
Infineon Technologies
SSR RELAY SPST-NO 190MA 0-250V
MAX1876EEG
Analog Devices Inc./Maxim Integrated
PWM STEP-DOWN CONTROLLER -

NB4L52MNG
onsemi
IC FF D-TYPE SNGL 1BIT 16QFN
GCM3195C1H272JA16D
Murata Electronics
CAP CER 2700PF 50V C0G/NP0 1206
MC10E151FNR2
onsemi
IC FF D-TYPE SNGL 6BIT 28PLCC
AD7720BRUZ
Analog Devices Inc.
IC SIGMA-DELTA 16B 12.5M 28TSSOP
LT1460HCS3-3.3#TRPBF
Analog Devices Inc.
IC VREF SERIES 0.2% SOT23-3
MPC8572EPXATLD
Freescale Semiconductor
MPU, 32-BIT, 1200MHZ, PBGA1023
AT80C32X2-SLRUM
Microchip Technology
IC MCU 8BIT ROMLESS 44PLCC
TPS78501QWDRBRQ1
Texas Instruments
IC REG LINEAR POS ADJ 1A 8SON
KA7805ERTF
Fairchild Semiconductor
IC REG LINEAR FIXED POS STD REG
BGA2817,115
NXP USA Inc.
IC RF AMP GPS 0HZ-2.2GHZ 6TSSOP
AD9204BCPZ-80
Analog Devices Inc.
IC ADC 10BIT PIPELINED 64LFCSP
MK1491-06RLFTR
Renesas Electronics America Inc
IC CLK SOURCE AMD GEODE 28-QSOP
1SMC51AT3G
Littelfuse Inc.
TVS DIODE 51VWM 82.4VC SMC
SMAJ14A
SMC Diode Solutions
TVS DIODE 14VWM 23.2VC SMA
CD4051BCMTCX
onsemi
IC MUX 8:1 240OHM 16TSSOP
LMR16006YQ3DDCRQ1
Texas Instruments
IC REG BUCK 3.3V 600MA TSOT23-6
SS14_R1_00001
Panjit International Inc.
DIODE SCHOTTKY 40V 1A SMA
ADF4159CCPZ-RL7
Analog Devices Inc.
IC PLL FREQ SYNTHESIZER 24LFCSP